3D Curve Drawings

About
This is the companion website to the paper:
From Multiview Image Curves to 3D Drawings ECCV 2016
Expanded version (pdf | supplement | poster | bib)
Feel free to contact us if you need additional information or source code. Please note that this is a dynamic website that is frequently updated.
Authors
- Anil Usumezbas: main author of the 3D drawing system. Researcher at SRI International
- Ricardo Fabbri: main author of the 3D Curve Sketch system and other curve-based SfM technology, tenured professor at Rio de Janeiro State University
- Benjamin Kimia: professor at Brown University and a mentor of the curve-based paradigm
new! Code for 3D Curve Sketch now available! new!
new! CVPR 2017 paper "The Surfacing of Multiview 3D Drawings via Lofting.." accepted! new!
new! Analytic Multiview Curve Dataset now available! new!
new! ArXiv preprint "Trifocal Relative Pose from Lines at Points and its Efficient Solution" new!
Code
3D Curve Sketch
- Source code is in the new VXD project we created as part of the 3D Curve Drawing code release effort. The relevant code is in the BMCSD (Brown Multiview Curve Sketch) library. We are preparing better instructions, it is a fairly large multithreaded system, but we suggest you start looking at bmcsd/cmd/mcs.cxx (multiview curve sketch command). Check out the git log for news regarding this code base, or email us for news or instructions. Only Linux or Mac OSX are supported.
3D Curve Drawing
- Source code in Matlab coming soon!
- This code is in matlab. We are in the process of making this code available in a usable form. In the meanwhile, please contact us.
Datasets
We have devised a number of datasets for curve-based multiview reconstruction and camera estimation algorithms, described in further detail at the end of this webpage.
- Barcelona Pavillion: the first realistic large-scale synthetic dataset with full groundtruth. Download is now available!
- Vase dataset: real data obtained from manually marking edges on structured light scans.
- Synthetic Curves: subpixel multiview ground truth image and camera data including tangents, curvatures and torsion information for curves with known analytic form and cameras. This is useful for fine-grained testing and development of curve-based reconstruction systems and camera/pose estimation. Download is now available! new!
- Amsterdam House: coming soon!
- Capitol High: coming soon!
Publications
- Trifocal Relative Pose from Lines at Points and its Efficient Solution, Arxiv, march 23 2019 4:29 UTC, R. Fabbri, T. Duff, H. Fan, M. Regan, D. de Pinho, E. Tsigaridas, C. Wrampler, J. Hauenstein, P. J. Giblin, B. Kimia, A. Leykin & T. Pajdla (pdf | code | datasets) new!
- The Surfacing of Multiview 3D Drawings via Lofting and Occlusion Reasoning, CVPR 2017, R. Fabbri, A. Usumezbas & B. Kimia (pdf | supplement | code | datasets | website | bib)
- Multiview Differential Geometry of Curves, R. Fabbri and B. Kimia, IJCV, 2016 (pdf | bib)
- The theoretical basis of our 3D curve-based reconstruction and pose estimation / extrinsic calibration technology. This paper shows how to recontruct and reproject curve tangents, curvatures and torsions, and occluding contours, using standard camera models.
- 3D Curve Sketch: Flexible Curve-Based Stereo Reconstruction and Calibration, CVPR 2010, R.Fabbri and B. Kimia. The practical basis of the 3D Curve Drawing work above (pdf | poster | code | website | bib)
- Camera Pose Estimation Using Curve Differential Geometry, updated and published into PAMI 2020ECCV 2012, Firenze, Italy, R. Fabbri, P. J. Giblin & B. Kimia (pdf | code | bib)
- Overview of our Multiview Differential Geometry of Curves and Surfaces research programme
- Updated list of publications
Barcelona Pavillion Dataset
The first publicly available, realistic 3D curve ground truth dataset to be used in the evaluation of curve-based multiview stereo and camera estimation algorithms.
Overview
Realistic videos rendered under 3 extreme illuminations

Sample frames of three different videos for different illumination conditions

The full curve ground truth and a useful bounding box


Mesh edges are deleted to make the desired ground truth edges explicit


Even minute objects were modeled by discarding internal mesh edges (blue below)


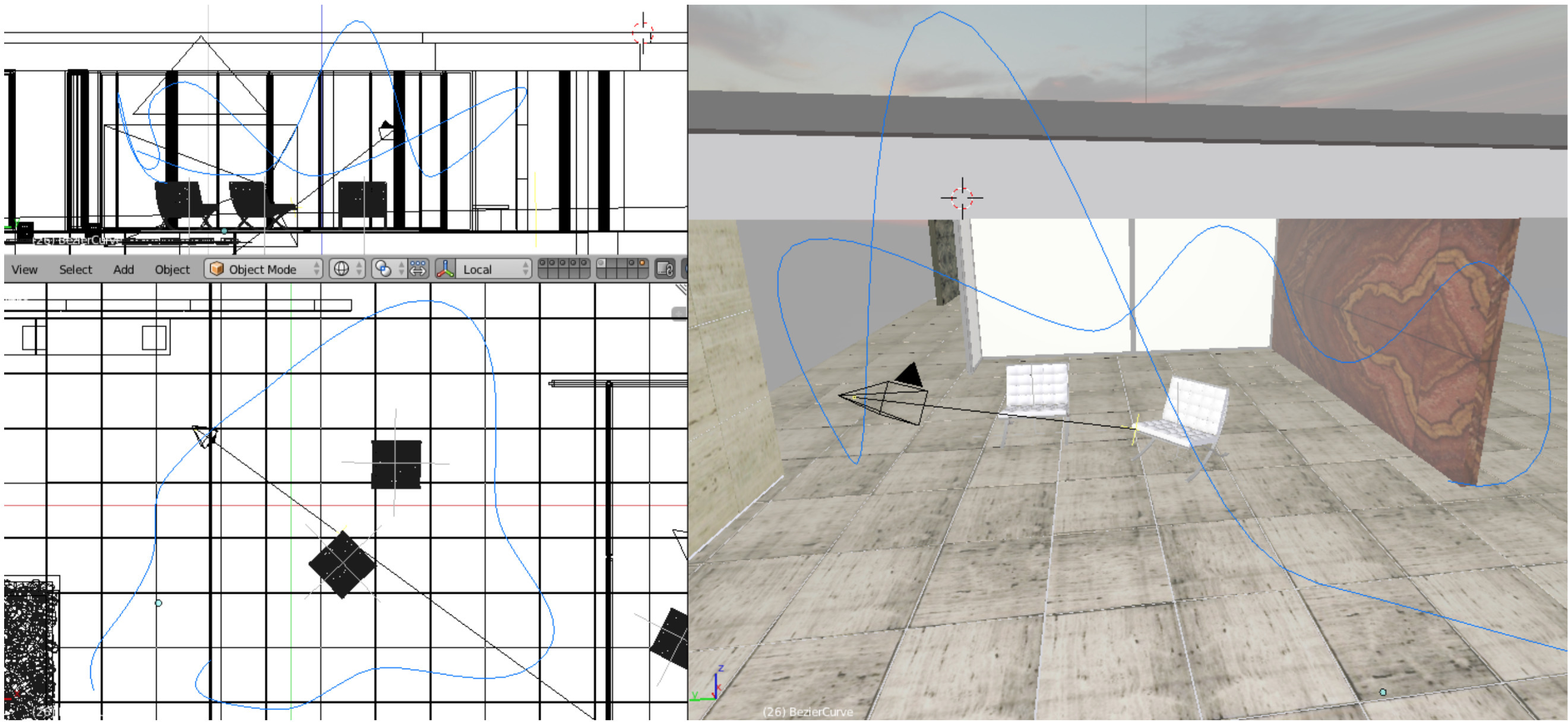
Camera path (blue) used to render the videos and generate ground-truth cameras
Video Samples for the Chair Sequence
Download new!
- Download or Browse at Github (~3GB). This way you can download
the entire archive or just individual files, and when changes occur you can download incrementally or even contribute. You will neeed Git LFS (Large File Storage). Clone the repository, then run
git lfs pull
- This dataset is being continuously updated, please check for news in the Git log
Details
The Barcelona Pavillion is a realistic synthetic dataset we created for validating curve-based 3D SfM and stereo algorithms with control over illumination, geometry and cameras. Non-curve-based multiview stereo and SfM algorithms also benefit from this dataset, as we provide full detailed mesh ground truth.
The dataset consists of:
- 3D models composing a large, mostly man-made, scene professionally composed by eMirage studios using the 3D modeling software Blender
- ground-truth cameras fly-by's around chairs with varied reflectance models and cluttered background
- ground-truth videos realistically rendered with high quality ray tracing from Blender under 3 extreme illumination conditions (morning, afternoon, and night)
- ground-truth 3D curve geometry obtained by manually tracing over the meshes.
- real-world referencing: this synthetic data was modeled after a real scene in Barcelona, for which real information such as imagery and dimensions is available
Vase Dataset
Real data obtained from manually marking edges on structured light scans.
Overview
This real curve 3D groundtruth is constructed by manually deleting points of a dense point cloud obtained from structured lighting. Using the point cloud alone, the 3D edges are not identifiable with confidence. Therefore, we reproject the dense point cloud scan onto reference images during editing for disam biguating edges. The unstructured point cloud from structured lighting tends to suffer from oversmoothing, and lacks structure near edges, which we recover from the reference images registered using the ground truth camera parameters.
Red points near edges obtained from structured lighting registered to images

Points from the 3D scan that are on homogeneous regions are manually deleted. The selected points to be deleted are shown in yellow simultaneously in reference views and on the 3D scan itself, so that with confidence we know its not an edge

Cameras corresponding to the reference views (left) and zoom into the deletion process

Download new!
- Download or Browse at Github (~100MB). This way you can download
the entire archive or just individual files, and when changes occur you can download incrementally or even contribute. You will neeed Git LFS (Large File Storage). Clone the repository, then run
git lfs pull
- This dataset is being continuously updated, please check for news in the Git log
Details
- The structured lighting scans and camera models were obtained from the DTU Robot Image datasets
- The editing was performed in Blender by loading the cameras and setting the images as references
Synthetic Curves Dataset
Space curves with known formulae are sampled and projected to subpixel edgels (tangent and other differential-geometric information) to generate image sequences.
Overview
The differential geometry arises by projecting the 3D measurements according to "Multiview Differential geometry of Curves", IJCV 2016.Analytic multiview data to 3rd order (tangent, curvature, curvature derivative)


Download new
- Download or Browse at Github (~100MB). This way you can download
the entire archive or just individual files, and when changes occur you can download incrementally or even contribute. You will neeed Git LFS (Large File Storage). Clone the repository, then run
git lfs pull
- This dataset is being continuously updated, please check for news in the Git log
Details
- 40 curves:Lines, circles, ellipses, helices, and another space curve with complicated torsion.
- 5117 samples total in 2D and 3D
- Cameras in three geometries:
- Spherical configuration: 100 views
- Video camera configuration (small focal length)
- Micro-CT configuration (objects lying between optical center and CCD)
- Space curves are sampled and projected to subpixel edgels (tangent and other differential-geometric information) to generate a video. The differential geometry arises by projecting the 3D measurements according to "Multiview Differential geometry of Curves", IJCV 2016.
- Each image is 500x400px
Amsterdam House Dataset
coming soon!Capitol High Dataset
coming soon!References



